

12
Jun
2015Just started the development of J-deite RIDE!
Brave Robotics and Asratec started joint development of a huge transforming robot “J-deite RIDE”.
“J-deite RIDE” is the high-end model of the “J-deite Quarter” which was announced last year, and it also adopts Asratec’s robot control system “V-Sido OS.”
We aim to complete development in 2017 and development process will be continuously announced on this website.
Specification table
| Model name | J-deite RIDE |
|---|---|
| Model number | J-RIDE-2016 |
| Humanoid mode | Vehicle mode | |
|---|---|---|
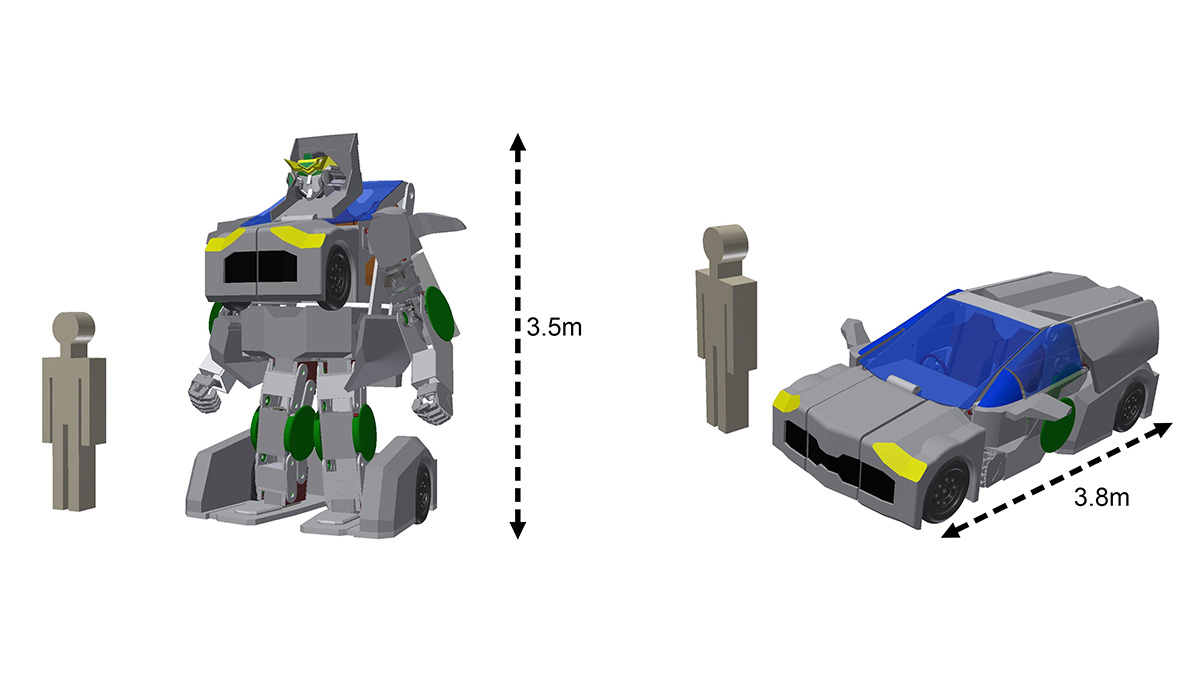
| Full length | 2100mm | 3800mm |
| Full width | 2500mm | 1700mm |
| Total height | 3500mm | 1400mm |
| Maximum wheel speed | 30km/h | 60km/h |
| Maximum walking speed | 10km/h | – |
| Minimum turning radius | 0m(Ultra pivot turn) | 5m |
| Wheel base | – | 2660mm |
| Tread | 1620mm | 1500mm |
| Leg pitch axis distance | 300mm | – |
| Wheel drive system | 2WD(Differential drive) | 2WD(RR) |
| Wheel drive motor | Electric motor + speed reducer | |
| Transmission | – | |
| Steering | Leg yaw axis+Wheel differential drive | Steer-by-wire |
| Grip | Right hand, left hand | – |
| Tool use | Right hand, left hand | – |
| Body weight | 700kg | |
| Tire size | 145R12 6PR | |
| Riding capacity | 2 adults | |
| Seat height | 2100mm | 400mm |
| OS | V-Sido OS | |
| Maneuvering method | Direct manned maneuvering inside cockpit or unmanned remote control via wireless or wireline | |
| Interface | Steering wheel 3 pedals Shift lever Joystick Speech input |
Steering wheel 3 pedals Shift lever |
| Frame Material | Aluminum alloy, etc. | |
| Exterior Materials | FRP, etc. | |
| Power source | Lithium-based battery, etc. | |
| Joint drive system | Electric motor + speed reducer | |
| Number of joints | More than 30 | |
| Number of doors | 2 | |
| Transformation time | Less than 10 seconds | |
| Parking space | Supports General Mechanical multistory parking garages | |
| Stable posture | squatting position and upright standing position | Normal vehicle mode |
| Hanging-bolt position | Upper torso, waist side | |
* Current specification assumptions. May subject to change in the future.