ABOUT
In Project J-deite, we proceed research on robot technology that creates the next generation.
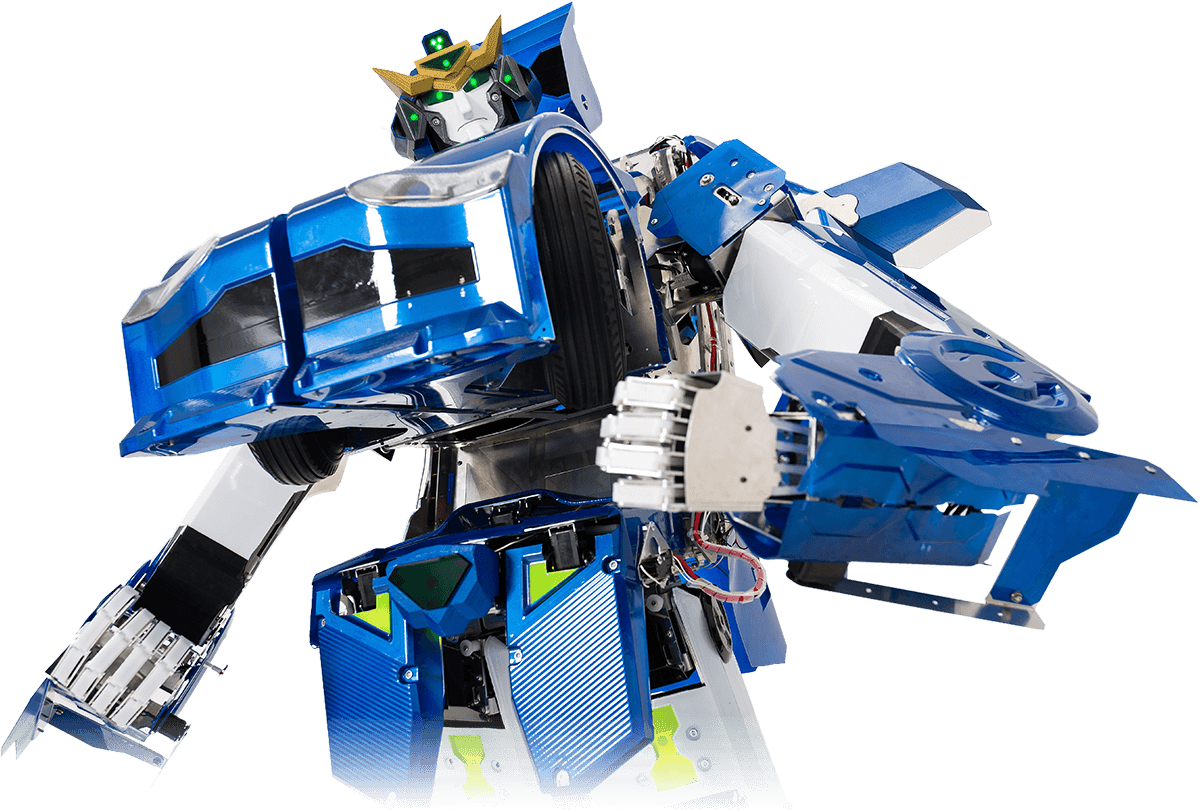
STATUS
In April 2018, we released a passenger type deformation robot ``J - deite RIDE`` with a total length of about 4 m.
GOAL
The Final goal is a huge transformation robot development of long 5 meters. To complete in the 2020s.
TRANSFORM
Humanoid mode from vehicle mode, deformation to vehicle mode from humanoid mode.
CONTROL & OPERATE
Steerable. Also, in the series of the total height 3.5 meters later, it can also be steered in the boarding.
DRIVE A J-deite
Can wheel traveling in the vehicle mode. It can be two-legged walking and wheel traveling in humanoid mode.
PROGRESS REPORT
J-deite Quarter/J-deite RIDE/Bamblebee Quarter/Bamblebee 20…. Research results and report.
DEVELOPER TEAM

ORIGINATOR
KENJI ISHIDA
For Kenji Ishida, a Transformable Robot Creator, a common humanoid robot is not a true robot.
A robot that can be transformed and incorporated is a true robot.
For him, this is definition of a robot.